- 您现在的位置:买卖IC网 > Sheet目录311 > AS5040 PB (ams)BOARD PROGRAM AS5040
�� �
�
�AS5040�
�Data� Sheet�
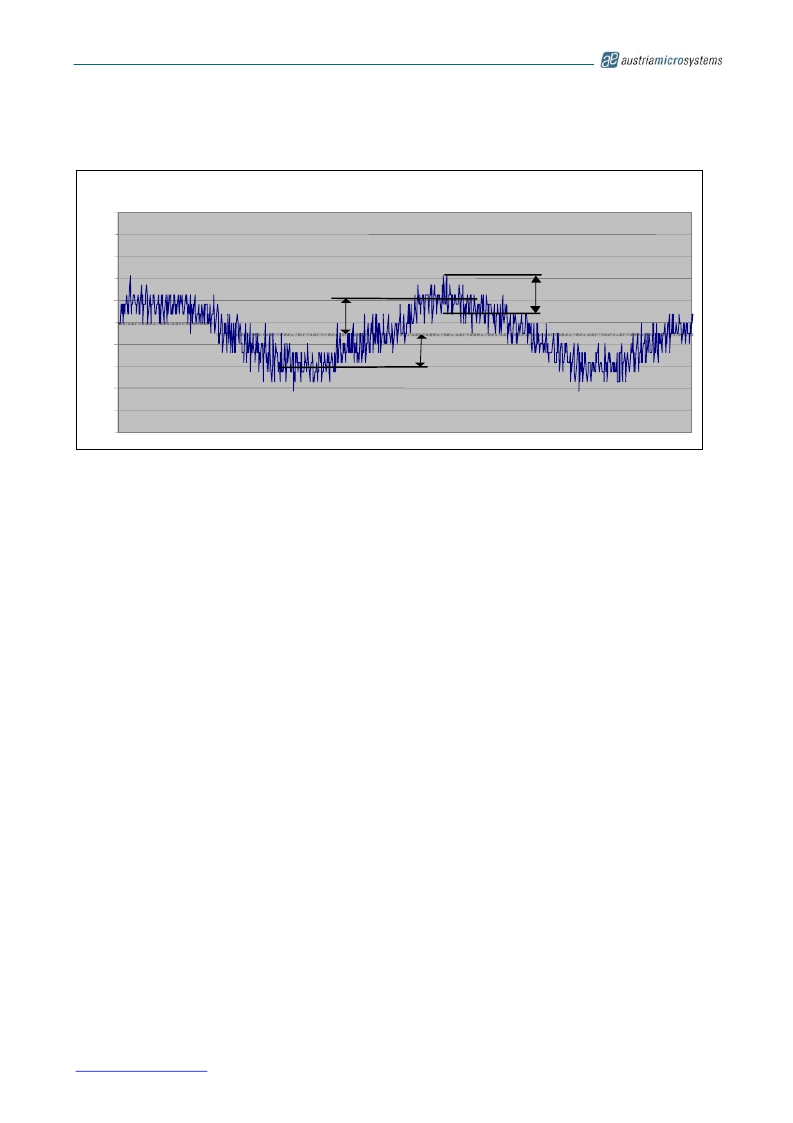
�Figure� 25:� Example� of� Linearity� Error� over� 360°�
�linearity� error� with� centered� magnet� [degrees]�
�0.5�
�0.4�
�0.3�
�0.2�
�0.1�
�0�
�Errmax�
�transition� noise�
�-0.1�
�-0.2�
�1�
�55�
�109� 163� 217� 271� 325� 379� 433� 487� 541� 595� 649� 703� 757� 811� 865� 919� 973�
�Errmi�
�-0.3�
�-0.4�
�-0.5�
�Transition� Noise�
�Transition� noise� is� defined� as� the� jitter� in� the� transition� between� two� steps.�
�Due� to� the� nature� of� the� measurement� principle� (Hall� sensors� +� Preamplifier� +� ADC),� there� is� always� a� certain� degree�
�of� noise� involved.�
�This� transition� noise� voltage� results� in� an� angular� transition� noise� at� the� outputs.� It� is� specified� as� 0.12� degrees� rms� (1�
�sigma)� *1� .�
�This� is� the� repeatability� of� an� indicated� angle� at� a� given� mechanical� position.�
�The� transition� noise� has� different� implications� on� the� type� of� output� that� is� used:�
�Absolute� output;� SSI� interface:�
�The� transition� noise� of� the� absolute� output� can� be� reduced� by� the� user� by� applying� an� averaging� of� readings.�
�An� averaging� of� 4� readings� will� reduce� the� transition� noise� by� 6dB� or� 50%,� e.g.� from� 0.12°rms� to� 0.06°rms� (1�
�sigma).�
�PWM� interface:�
�If� the� PWM� interface� is� used� as� an� analog� output� by� adding� a� low� pass� filter,� the� transition� noise� can� be�
�reduced� by� lowering� the� cutoff� frequency� of� the� filter.�
�If� the� PWM� interface� is� used� as� a� digital� interface� with� a� counter� at� the� receiving� side,� the� transition� noise�
�may� again� be� reduced� by� averaging� of� readings.�
�Incremental� mode:�
�In� incremental� mode,� the� transition� noise� influences� the� period,� width� and� phase� shift� of� the� output� signals� A,�
�B� and� Index.� However,� the� algorithm� used� to� generate� the� incremental� outputs� guarantees� no� missing� or�
�additional� pulses� even� at� high� speeds� (up� to� 30,000� rpm� and� higher)�
�*1�
�:� statistically,� 1� sigma� represents� 68.27%� of� readings,�
�3� sigma� represents� 99.73%� of� readings.�
�www.austriamicrosystems.com�
�Revision� 2.10�
�27� -� 33�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
AS5043 PB
BOARD PROGRAM AS5043
AS5045 PB
BOARD PROGRAM AS5045
AS5134 PB
BOARD PROGRAM AS5134
AS5140 PB
BOARD PROGRAM AS5140
ASDMB-ADAPTER-KIT
ASDMB MEMSPEED P II OSC KIT
ASFLMPLP-ADAPTER-KIT
ASFLMPLP MEMSPEED P II OSC KIT
AT24C01-10SI-1.8
IC EEPROM 1KBIT 400KHZ 8SOIC
AT24C01B-TSU-T
IC EEPROM 1KBIT 1MHZ SOT23-5
相关代理商/技术参数
AS5040_09
制造商:AMSCO 制造商全称:austriamicrosystems AG 功能描述:10Bit 360 Programmable Magnetic Rotary Encoder
AS5040_1
制造商:AMSCO 制造商全称:austriamicrosystems AG 功能描述:10Bit 360 Programmable Magnetic Rotary Encoder
AS5040-AB
功能描述:插座和适配器 AS5040 Adapter Board RoHS:否 制造商:Silicon Labs 产品:Adapter 用于:EM35x
AS5040-ASSM
功能描述:AS5040-ASSM SSOP16 LF T&RDP 制造商:ams 系列:- 零件状态:在售 编码器类型:磁性 输出类型:PWM 每转脉冲数:512 电压 - 电源:4.5 V ~ 5.5 V 致动器类型:外磁铁,不含 棘爪:无 内置开关:无 安装类型:表面贴装 朝向:- 端子类型:表面安装(SMD,SMT) 旋转寿命(最少次数):- 标准包装:500
as5040asst
制造商:ams 功能描述:T&R / SSOP 16
AS5040-ASST
功能描述:板机接口霍耳效应/磁性传感器 10Bit Rotary Sensor w/Digital Interface RoHS:否 制造商:Honeywell 类型:Bipolar Hall-Effect Digital Position Sensor 工作电源电压:3 V to 24 V 电源电流:3.5 mA 最大输出电流:20 mA 工作点最小值/最大值:5 G, 55 G 最小/最大释放点(Brp):- 55 G, - 5 G 最大工作温度:+ 150 C 安装风格:SMD/SMT 封装 / 箱体:SOT-23
AS5040ASSU
制造商:AMS 功能描述:IC MAGNETIC ROTARY ENCODER 10BIT SSOP16 制造商:AMS 功能描述:IC, MAGNETIC ROTARY ENCODER 10BIT SSOP16 制造商:AMS 功能描述:IC, MAGNETIC ROTARY ENCODER 10BIT SSOP16; IC Function:Encoder IC; Brief Features:360 Contactless High Resolution Angular Position Encoding, Two 10-bit Absolute Output; Supply Voltage Min:3V; Supply Voltage Max:3.6V; No. of Pins:16 ;RoHS Compliant: Yes
AS5040-ASSU
功能描述:板机接口霍耳效应/磁性传感器 10Bit Rotary Sensor w/Digital Interface RoHS:否 制造商:Honeywell 类型:Bipolar Hall-Effect Digital Position Sensor 工作电源电压:3 V to 24 V 电源电流:3.5 mA 最大输出电流:20 mA 工作点最小值/最大值:5 G, 55 G 最小/最大释放点(Brp):- 55 G, - 5 G 最大工作温度:+ 150 C 安装风格:SMD/SMT 封装 / 箱体:SOT-23